No offense but this is a really poor argument because one image (even a 360° pano) for more than every 15 meters is poor quality either in an urban environment. So please, hold your horses there.
Since currently only UKMs are scored, there is a loop hole in the contest rules where one can easily eat many UKMs by capturing long sequences with just one image per intersection or junction and move on. Hence, I do call all participants to do exactly that because according to the rules it is a fair strategy to advance your chances of winning. Seriously, go for it people!
Like I have mentioned before, the scores need to be leveled by a target ipkm factor. mapillary_tools’ 0.333 ipm (currently for video) seems like a reasonable and fair target to me. A target ipm factor not only ensures a level playing field for everybody but also that participants do not overshoot or undershoot.
For even more fairness, you can add total pixels and pixels per meter factors too.
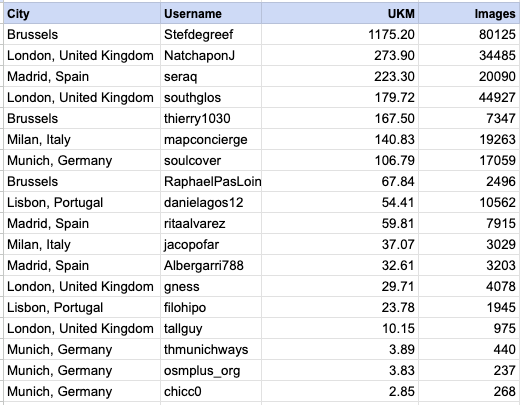
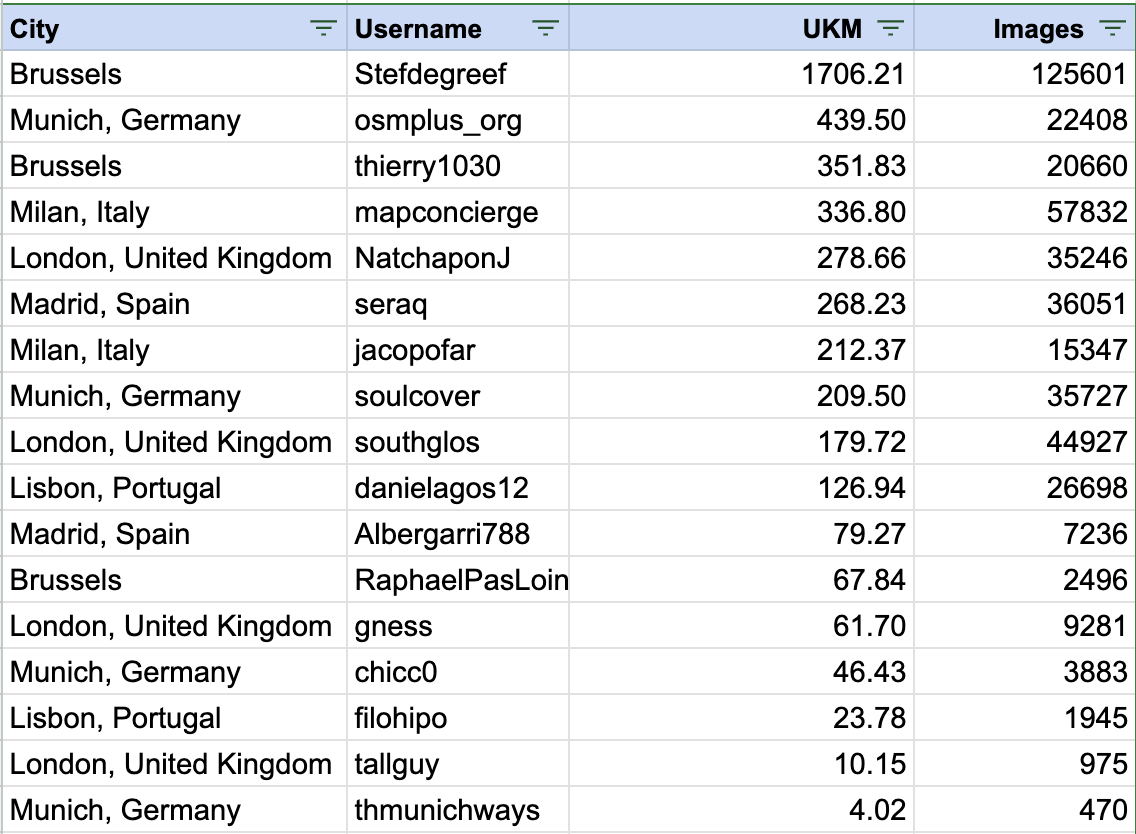
Thanks, everyone, for the strong third week as part of the CompleteTheMap Europe challenge. I’d like to share the UKM stats as of July 7thth, 2025. The challenge has helped us acquire 2593.19 fresh UKMs for improving maps, with a total of 258,444 imagery!
On the email you’ve sent at the begining of the challenge stated swag would be elligible for those who have 100-150km and 150+ ukm would qualify to a amazon gift card.
Meanwhile the blog post states that swag is only available for those who make 200-300 ukm and amazon gift cards above 300 ukm
With all due respect but that’s the total opposite metric that is supposed to be used here.
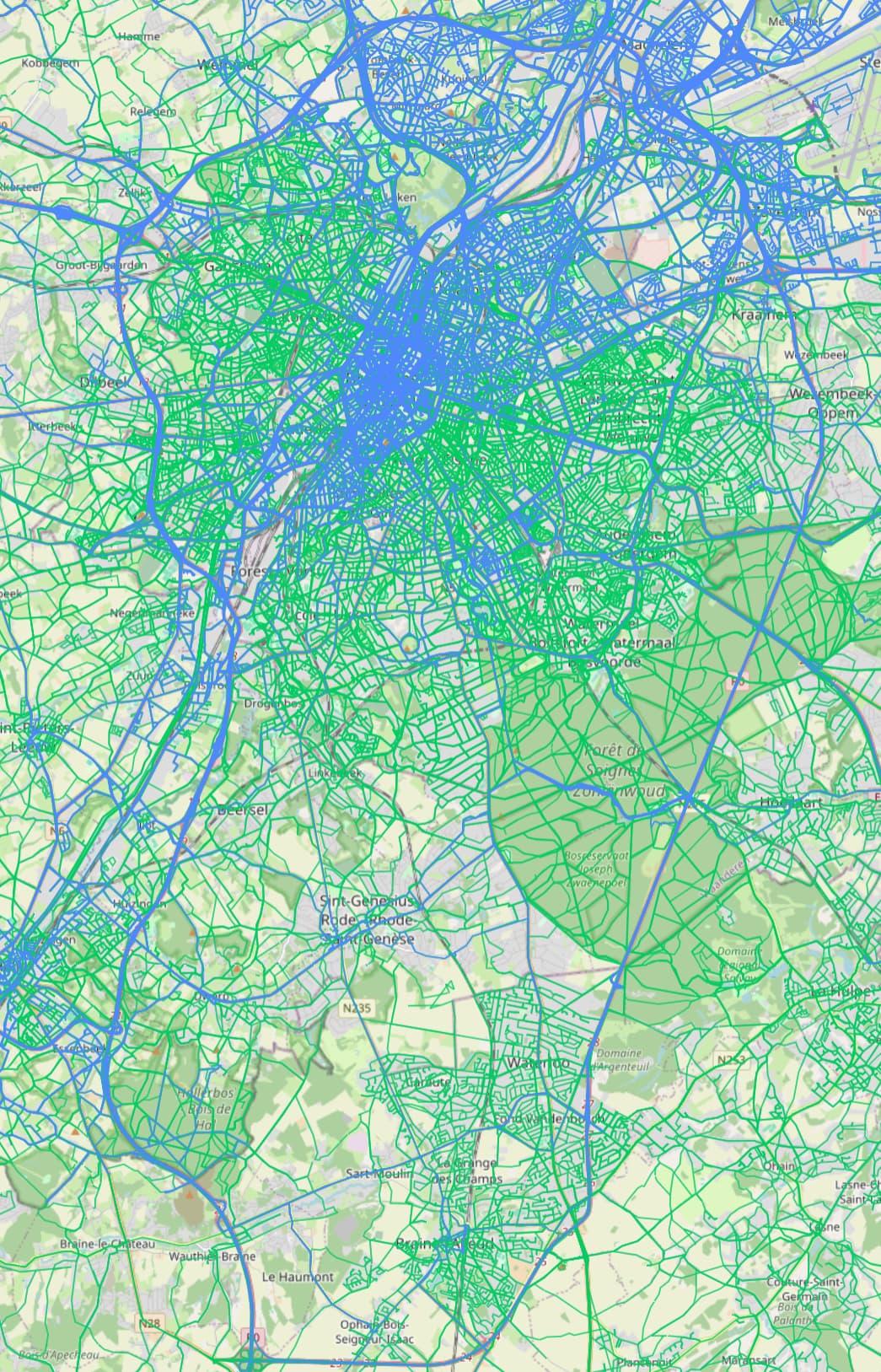
The goal is not having an image every meter. It’s supposed to have as much of a city with street imagery.
I’ve noticed that you’re not even in the challenge. Not only that. your profile is filled with 100~200 m sequences with thousands of images. Some of them have an image every 20 cm. Most of them don’t add value to the others and won’t be more useful in the context for mapping openstreetmap and HERE maps which is one of the goals of this challenge
Let me clarify your undifferentiated confusion. My comments serve as an inspiration to think about fairness and a loop hole in the contest rules. Nothing more, nothing less.
No, it is not the opposite. It is a proposition of refinement for fairness and quality. The ipm target factor does neither invalidate nor remove UKMs as the final metric on which participants compete. The ipm target factor levels the playing field. Why? Because some contributors capture on foot, some by bike, some by car, others by scooters and yet others on wheelchairs with different kinds of cameras. It is only natural that each mode of transportation results in different capture densities and different distances traveled in a given period of time. Hence, to level the playing field for everybody it would be wise to incorporate the ipm target factor. Mapillary has decided on the simplest metric to measure (and understand). That’s okay but this simplicity is unfortunately prone to lack full fairness for all participants. Keep in mind that a target factor penalizes undershooting as well as overshooting. Imho one image every three meters is a bit too sparse in an urban environment. Personally, I would go for one image every meter (1 ipm) in the city. One image every three meters should be good enough in rural areas and on highways. But, that’s just my opinion. Mapillary has settled long time ago on one every three meters mainly because it produces nice enough transitions in the viewer and provides acceptable coverage density, which is a fair consideration.
Right, it isn’t, and neither is it with a target density factor of 0.333 ipm.
Right, which unfortunately none of the paticipants have actually met, except for maybe @southglos who so far comes closest with 0.25 ipm.
So what? Is it forbidden to think about fairness and quality?
Actually, some sequences have a space density of 4 cm, which granted, is probably overkill (espacially given the MAX’s poor image resolution in this capture mode) but these should be rather treated as tests.
Mapillary’s dataset does not serve OpenStreetMap or HERE Maps mapping exclusively. The dataset also serves as training data for partially autonomous (level 4+) vehicles (a cheap substitute for immensely expensive LIDAR data), for measuring real estate lots, documenting construction site progress, identifying and proving real estate tax claims, and many things more. Every use case needs different levels of capturing density in space and resolution. In other words, it does not hurt to go for high density and high resolution. Anyhow, for the sake of the contest and quality of the resulting data, it would be nice and beneficial to everybody if Mapillary would incorporate a target density factor into the rules.
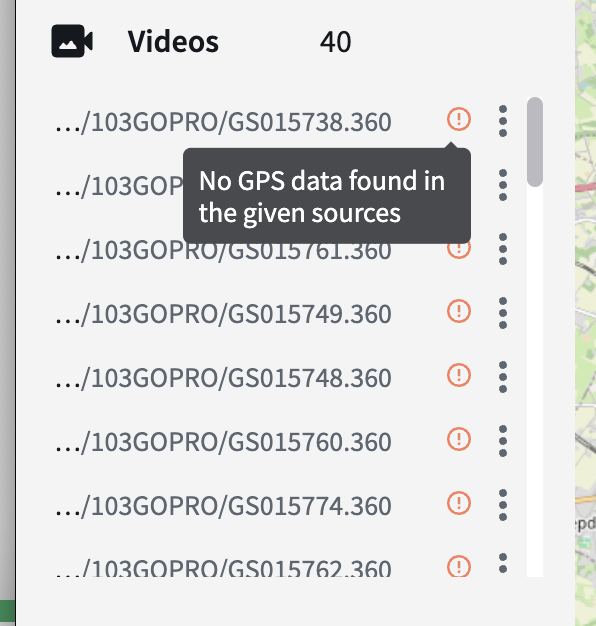
So as per GITNE suggestion to shoot more pictures per KM, I tried shooting timelapse videos to acquire 4 images per second instead of 1 every two seconds. Results? In Brussel’s urban canyons, the GPS can’t keep up properly and, while losing a picture here and there is no big deal, here I’m losing entire video sequences so I’ve lost several hours of work because there’s no GPS coordinates associated with the videos. I had a GPX file but there’s a time offset between it and the video timestamps so it’s not syncing properly. What a waste of time and efforts. Back to shooting timelapse photos because life’s too short for wasting streetview imagery !
If your equipment loses GPS signal contact in urban canyons (or wherever else), you are unable, or do not want to put in the effort to sync video with GPX data then this does not invalidate the concept of a target density factor. But, kudos for trying.
I am gonna reveal a “secret” to you you can also simply go sloooower in 360° Photo Time Lapse Mode to increase capture density.
It’s just a suggestion. You do not have to do it.
If you do not want to completely lose your footage, you can upload the .360 video files to some cloud storage, share a link with me via PM, and I can process and upload the resulting imagery to Mapillary for you. I probably do not even need any GPX files. Though, I cannot guarantee that it will be done before the contest closes.
cc @tao@nikola@boris Is this expected behaviour on Desktop Uploader? Can not we accept the images with GPS data and reject the ones with no GPS data attached?
@asturksever , @Stefdegreef - this problem was with videos, not images - so yes unfortunately if the video doesn’t have good GPS we cannot accept it. The GoPro does struggle with GPS in certain cases causing this problem on occasion. Some units seem to be more prone to GPS issues than others. We should do a test of the 2025 MAX to see if this has been improved.